Parallel Compensator for Non-Minimum Phase Nonlinear Systems
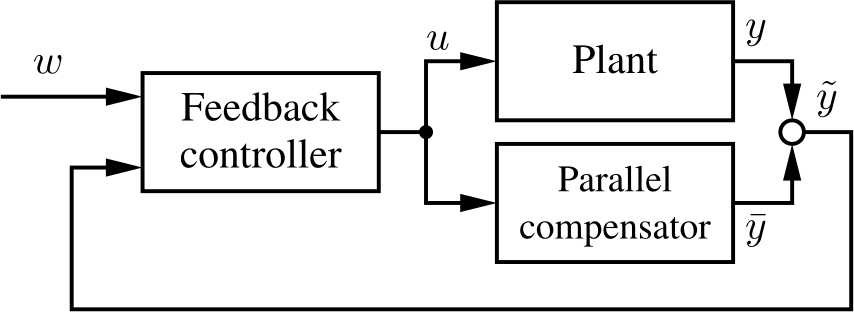
A parallel compensator is an additional dynamical system acting in parallel to a given plant [1].
Some foundations of this approach for nonlinear systems are discussed in [2,3].
Github
https://github.com/TUD-RST/parallel-compensator-boost
Publications
- Schwarz, H.: Changing the unstable zero dynamics of nonlinear systems via parallel compensation.
In: Control ’96, UKACC International Conference on (Conf. Publ. No. 427), Exeter, UK, Sep. 1996. - Röbenack, K.; Palis, S.: On the control of non-minimum phase systems using a parallel compensator.
In: 23rd International Conference on System Theory, Control and Computing (ICSTCC), 2019. - Röbenack, K.; Palis, S.: Nonlinear control of flat systems using a non-flat output with dynamic extension.
In: 22nd International Conference on System Theory, Control and Computing (ICSTCC), 2018.